Ученые Северо-Кавказского федерального университета работают над созданием инновационной роботизированной игрушки для детей с нарушениями речи и двигательных функций.
Устройство поможет взаимодействовать с детьми через синтезированную речь, реагировать на команды и стимулировать их речевое развитие во время игры.
– Проект демонстрирует возможности роботизированных игрушек на основе искусственного интеллекта для стимулирования речевого и социального развития детей с нарушениями. Подобных разработок на российском рынке практически нет. А значит мы сможем решить не только вопрос развития детей с ОВЗ благодаря искусственному интеллекту, но увеличить потенциал отечественного рынка в данном сегменте, – отметил кандидат технических наук, заведующий кафедрой территории опережающего социально-экономического развития СКФУ Эдуард Тихонов.
Авторы разработки подчеркнули, что игрушка будет управляться с помощью специальной коммуникационной панели, с которой ребенок сможет взаимодействовать, несмотря на двигательные нарушения. Нажимая на символы на панели, ребенку удастся заставить ее говорить, помимо данного сценария управления, робот будет реагировать на голосовые команды. В дальнейшем разработчики планируют интегрировать в игрушку модуль-няню, который поможет родителю общаться с ребенком даже на расстоянии, а также вести фото и видеодневники игровых активностей.
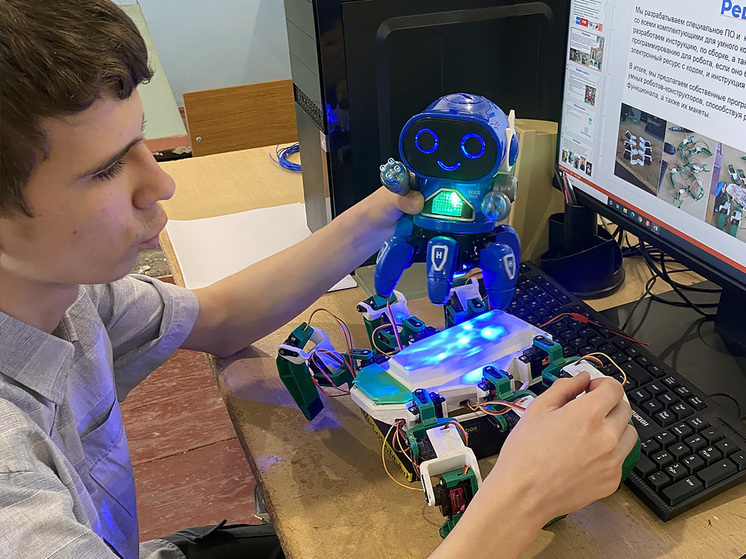
– В процессе создания концепта игрушки мы выбрали форму гексапода, проще говоря «осьминожки». Это обусловлено повышенной мобильностью и устойчивостью данной платформы. Благодаря специально разработанным алгоритмам взаимодействия с ребенком и разнообразным игровым программам в памяти устройства ребенок сможет интересно и с пользой проводить время. Игрушка обладает способностью общаться с детьми через синтезированную речь, реагировать на команды и стимулировать их речевое развитие во время игры. Сейчас наша команда активно занимается программной составляющей (интерфейсом), который как раз и позволит взаимодействовать с детьми, – поделился руководитель проекта Эдуард Тихонов.
Отметим, что на данный момент в разработке уже имеется механическая платформа-основа – гексапод (шестиногий робот). Ранее, команда студентов вуза под руководством заведующего кафедрой территории опережающего социально-экономического развития Невинномысского технологического института (филиала) СКФУ Эдуарда Тихонова представила ее на IT-акселераторе «Цифровые технологии - Кавказ». Проект «Разработка системы управления гексаподами» был признан одним из самых перспективных на мероприятии.